Regelungstechnik
Als Regelungsansatz wurde ein PID-Regler realisiert, mit dem es möglich ist, die vorgegeben Kraftkurven bei gut gewählten Parametern schnell und präzise nachzufahren. Die P-, I- und D-Anteile können über das Missionsportal für jede Mission separat eingestellt werden, um diese je nach Textil- und Kraftprofil anpassen zu können. Die Software wurde soweit vorbereitet, dass in einem zukünftigen Erweiterungsschritt der Regler nach dem Plug and Play Prinzip ausgetauscht werden kann. Die Idee ist es, die Parameter zukünftig durch Machine-Learning effizient anpassen zu können, um die optimalen Werte automatisiert zu bestimmen.
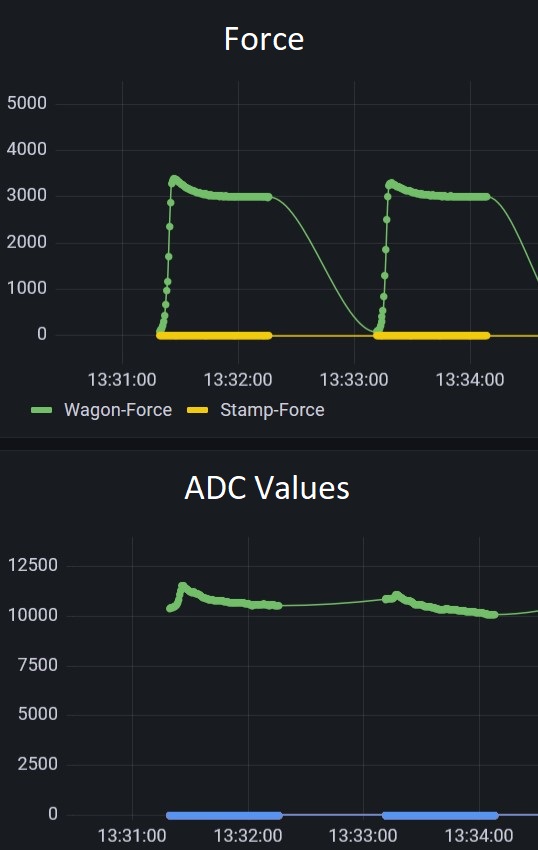
Es wurden drei verschiedene Testmodi entwickelt, mit denen unterschiedliche Vorgaben realisiert werden können. Grundsätzlich kann auf Position oder auf Kraft geregelt werden. Im Positionsmodus wird das Textil auf eine gewünschte Länge gedehnt und für eine vorgegebene Zeit gehalten. Der Kraftmodus ist wiederum in zwei Teilmodi unterteilt – mit und ohne Nachregeln.Beim Modus mit Nachregeln wird ein Kraftprofil vorgegeben, auf welches während der gesamten Missionsdauer geregelt wird. Beim Modus ohne Nachregeln, ändert sich die Position des Zugwagens nicht mehr, sobald der vorgegebene Kraftwert einmal erreicht wurde. So kann analysiert werden, inwiefern das Material mit der Zeit nachgibt.